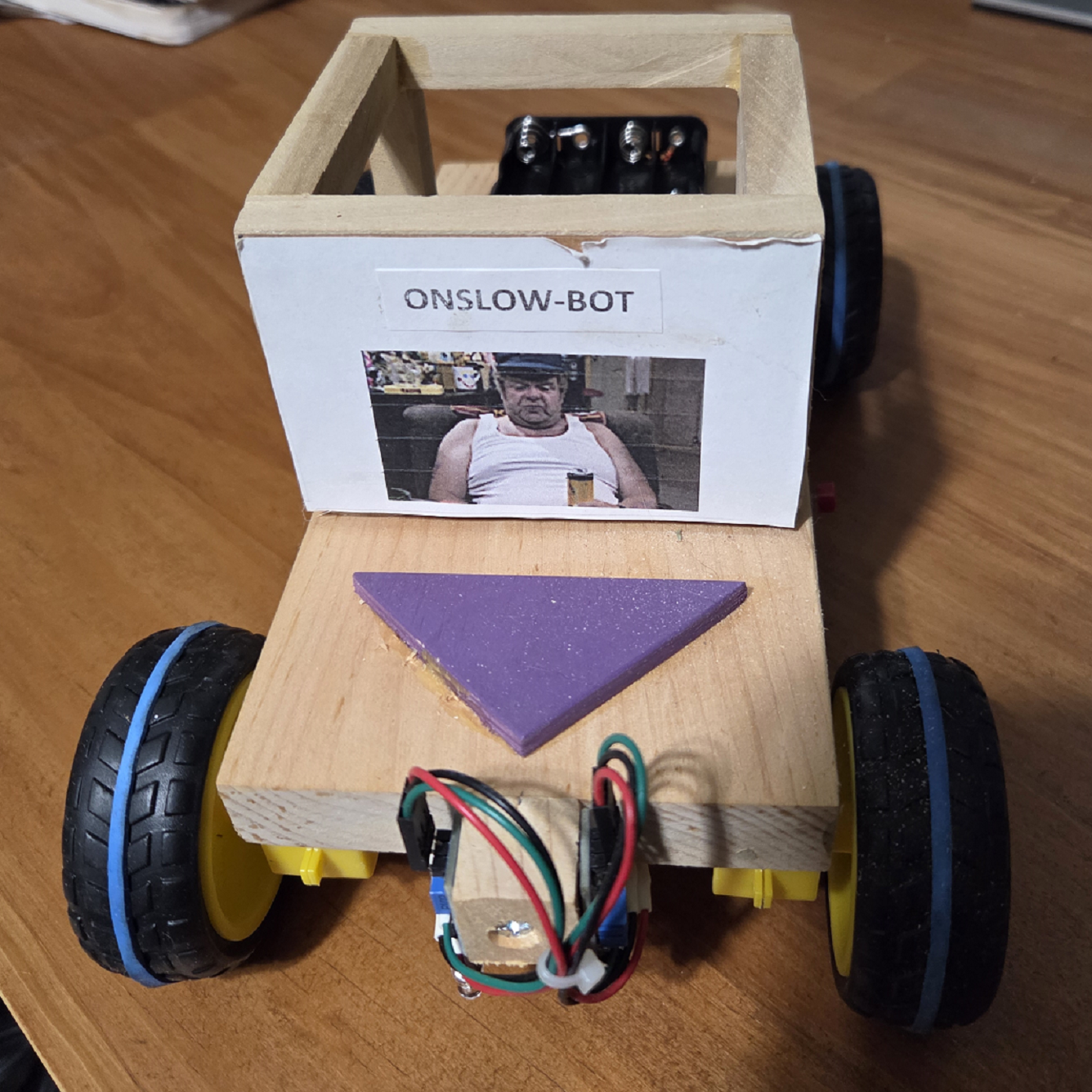

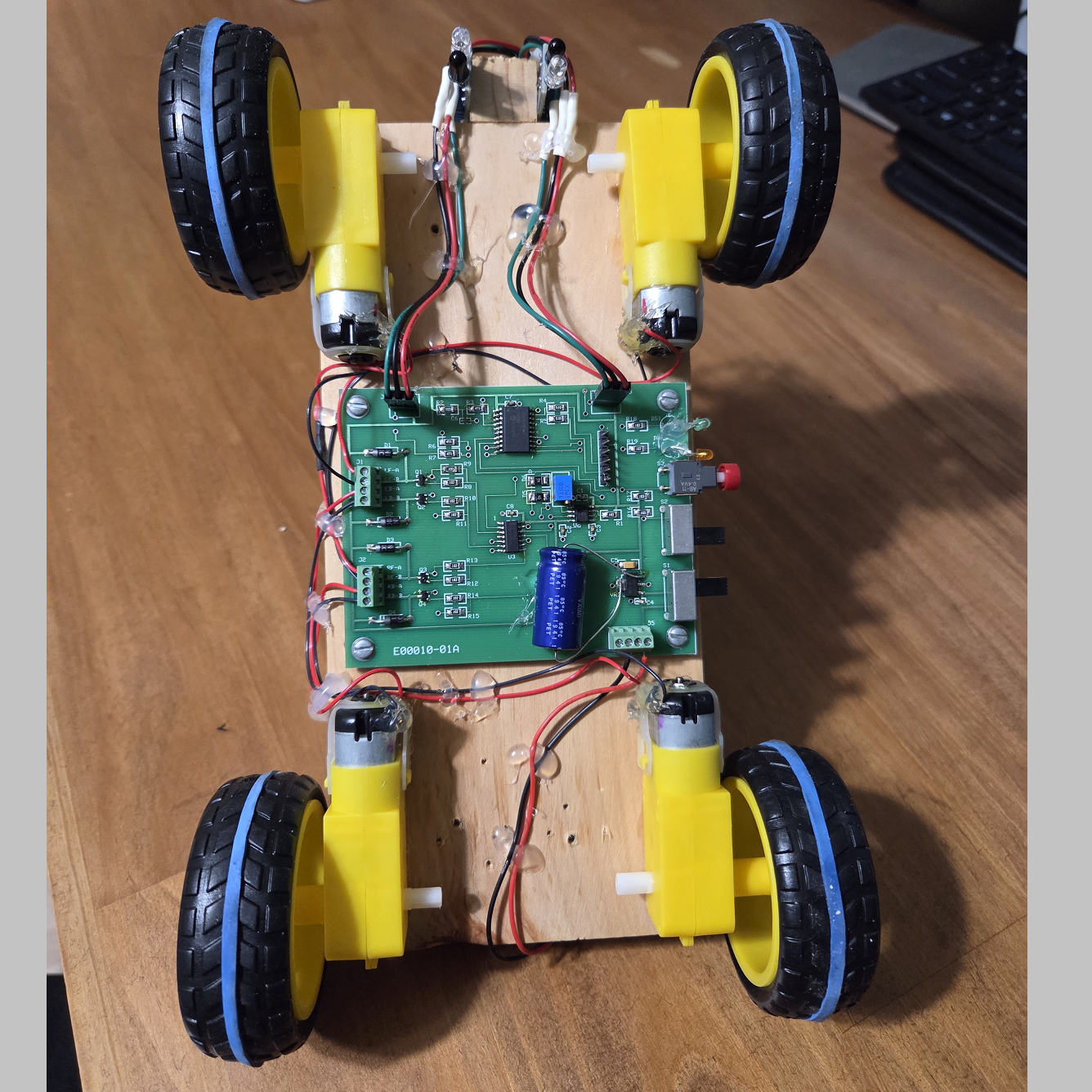
This is a prototype for a line-following robotic vehicle that can deliver drinks. It uses infrared transmitters and receivers to locate a dark
line, and uses this information to adjust its direction.
No kits were involved with this robot. The circuit, circuit board layout, firmware, and structure were all designed by myself.
No kits were involved with this robot. The circuit, circuit board layout, firmware, and structure were all designed by myself.

My reproduction of the classic "infinity mirror" design, made at an electronics club I used to frequent.
Pretty straight-forward design, but a lot of fun to make.
Pretty straight-forward design, but a lot of fun to make.

This is a classic Jacob's Ladder design, where an electric arc travels up the vertical wires.
This was my first project involving a high-voltage step-up transformer (about 10KV).
It got a little banged up in storage, but the lugs make it easy to replace the wires.
This was my first project involving a high-voltage step-up transformer (about 10KV).
It got a little banged up in storage, but the lugs make it easy to replace the wires.